





本实验的目的是让实验者熟悉角度编码器的基本原理,掌握利用计算机和运动控制卡对编码器进行数据采集的方法,以及利用计算机对电机进行控制的基本原理和方法,了解机电一体化的两个重要内容:传感技术和运动控制技术。以便顺利的完成倒立摆的各项实验。
编码器原理及使用实验
编码器原理
旋转编码器是一种角位移传感器,它分为光电式、接触式和电磁感应式三种,其中光电式脉冲编码器是闭环控制系统中最常用的位置传感器。
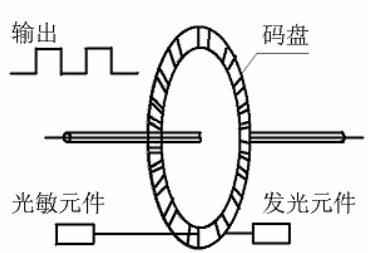
旋转编码器有增量编码器和绝对编码器两种,上图为光电式增量编码器示意图,它由发光元件、光电码盘、光敏元件和信号处理电路组成。当码盘随工作轴一起转动时,光源透过光电码盘上的光栏板形成忽明忽暗的光信号,光敏元件把光信号转换成电信号,然后通过信号处理电路的整形、放大、分频、记数、译码后输出。为了测量出转向,使光栏板的两个狭缝比码盘两个狭缝距离小\(\frac{1}{4}\)节距,这样两个光敏元件的输出信号就相差\(\frac{\pi}{2}\)相位,将输出信号送入鉴向电路,即可判断码盘的旋转方向。
光电式增量编码器的测量精度取决于它所能分辨的最小角度\(\alpha\)(分辨角、分辨率),而这与码盘圆周内所分狭缝的线数有关。 \[ \alpha=\frac{360^\circ}{n} \] 其中\(n\)为编码器线数。
由于光电式脉冲编码盘每转过一个分辨角就发出一个脉冲信号,因此,根据脉冲数目可得出工作轴的回转角度,由传动比换算出直线位移距离;根据脉冲频率可得工作轴的转速;根据光栏板上两条狭缝中信号的相位先后,可判断光电码盘的正、反转。
绝对编码器通过与位数相对应的发光二极管和光敏二极管对输出的二进制码来检测旋转角度。
与增量编码器原理相同,用于测量直线位移的传感器是光栅尺。
由于光电编码器输出的检测信号是数字信号,因此可以直接进入计算机进行处理,不需放大和转换等过程,使用非常方便,因此应用越来越广泛。
角度换算
对于线数为\(n\)的编码器,设信号采集卡倍频数为\(m\),则有角度换算关系为: \[ \phi=\frac{2\pi}{nm}N(rad) \ or \ \phi=\frac{360^\circ}{nm}N(degree) \] 式中\(\phi\)为编码器轴转角,\(N\)为编码器读数。
对于电机编码器,在倒立摆使用中需要把编码器读数转化为小车的水平位置,以下转换关系: \[ l=\frac{\pi\Phi}{nm}N \] 式中\(l\)为小车位移,\(\Phi\)为同步带轮直径。
Matlab Simulink 环境下的实验
仿真设置
- 仿真模式由Normal改为External模式。
- 仿真结束时间(Stop time)改为inf(无限长)。
- 求解器(Solver)选择为定步长(Fixed-step),仿真间隔(Fixed step size)改为0.005s。
- 在Real-Time Workshop中的配置(Configuration)选择系统目标文件(System target file)为rtwin.tlc。
实验一 摆杆角度检测实验
新建\(Simulink\)项目,按照仿真设置当中将对各项参数进行设置。
打开“Googol Education Products-SV Block Library”。
在“Get Current Axis’s Position”上点击鼠标左键并将模块拉到(以下简称为“拉”)刚才新建的窗口中。
双击“GetPos”模块,打开设置窗口,并选择轴号为“2”,即第一级摆杆连接的编码器,此编码器固定于小车上。
从“Simulink”中拉一个“Scope”到窗口中。
连接两个模块(移动鼠标到“<“上,鼠标箭头变成“+”,按下鼠标 左键并移动到“>”上,松开鼠标)。
在“Googol Education Products-SV Block Library”中拉一个“GT400-SV Initialization”模块到窗口中。
编译程序。
打开电控箱电源。
连接程序。
运行程序。
双击“Scope”模块观察数据.
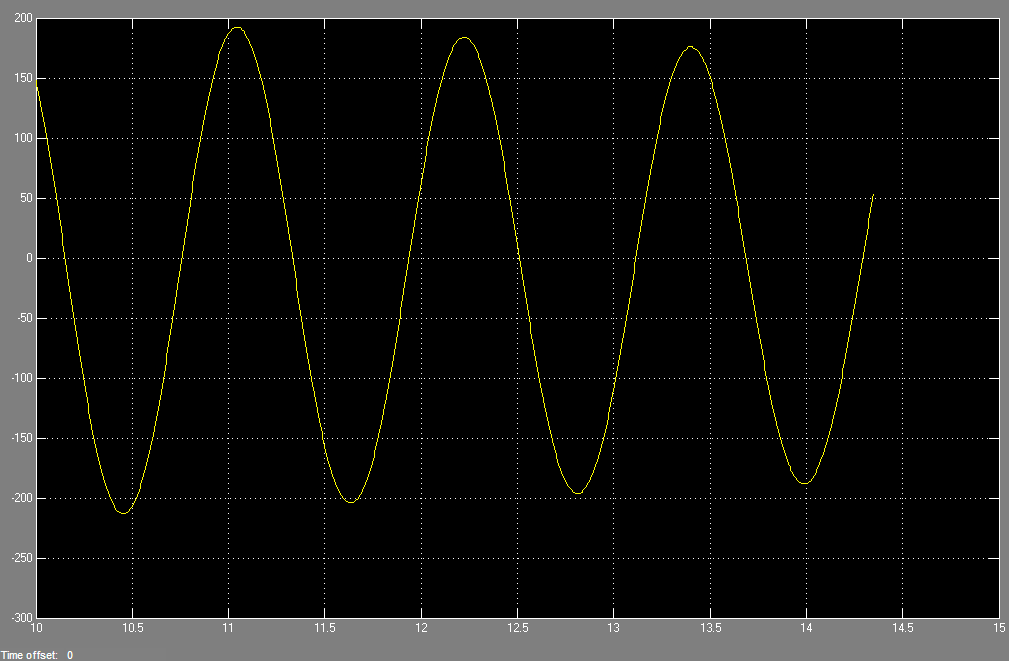
手动转动摆杆,观察显示结果,在数据超出显示范围时,点击缩放按键进行缩放。
记录实验结果。
记录Scope的结果如下图所示
实验二 电机控制实现
将运动控制器当前轴设定成速度控制模式,用户需要设定最大速度和加速度两个参数。在该模式下,开始运动时将以设定的加速度连续加速到设定的最大速度,运动方向由速度的符号确定,即正速度产生正向运动,而负速度产生负向运动。
新建\(Simulink\)项目,按照仿真设置当中将对各项参数进行设置。
打开“Googol Education Products-SV Block Library”。
拉“Set Current Axis’s Acc and Vel”模块到刚才新建的窗口中。
双击“SetAccVel”模块,打开如下窗口,参数设置如下:
“Axis number”:选择轴号为“1”,即小车电机所使用的轴。
“Back velocity”:此参数设定小车限位后反方向运动的速度,单位为米/秒。
“Back position”:此参数设定小车限位后反方向运动,单位为脉冲数。
从“Simulink”中拉两个“Constant”到窗口中。
连接三个模块。
设置连接“Vel”的“Constant”模块值为0.2,连接“Vel”的“Constant”模块值为0.1。
在“Googol Education Products-SV Block Library”中拉一个“GT400-SV Initialization”模块到窗口中。
编译程序。
打开电控箱电源。
连接程序。
运行程序。
观察小车的运动情况。
小车运动情况如下
实验结论
通过使用编码器,可以实现对摆杆角度的测量,可以将旋转角度这一模拟量转化为数字量并作为输入,进而参与控制器的实现。
通过使用电机,可以将数字控制量转化为模拟运动量,作为系统的输出,参与最终倒立摆的实现。
